PyElastica Documentation
Elastica is a free and open-source software project for the simulation of assemblies of slender, one-dimensional structures using Cosserat Rod theory.
More information about Elastica is available at the project website
PyElastica

PyElastica is the python implementation of Elastica. The easiest way to install PyElastica is with PIP:
$ pip install pyelastica
Or download the source code from the GitHub repo
Elastica++
Elastica++ is a C++ implementation of Elastica. The expected release date for the beta version is 2022 Q2.
Community

We mainly use git-issue to communicate the roadmap, updates, helps, and bug fixes. If you have problem using PyElastica, check if similar issue is reported in git-issue.
We also opened gitter channel for short and immediate feedbacks.
Contributing
If you are interested to contribute, please read contribution-guide first.
About
Elastica is a free and open-source software project for the simulation of assemblies of slender one-dimensional bodies using Cosserat Rod theory. It has been designed to be modular, extensible and easy to use. It allows the user to define a collection of Cosserat rods subject to both external (i.e. gravity, friction, etc…) and internal (i.e. muscle torque) forces. Rods account for self-contact and can be combined to create assemblies of rods, which can then be used to model increasingly complex system.
For more information on Elastica and Cosserat rods, see the project website https://cosseratrods.org
Elastica is developed and maintained by the Gazzola Lab at the University of Illinois at Urbana-Champaign. For more information on the projects we work on, see https://mattia-lab.com.
Funding for the development of Elastica has been provided by:

Installation
Instruction
PyElastica requires Python 3.5 - 3.8, which needs to be installed prior to using PyElastica. For information on installing Python, see here. If you are interested in using a package manager like Conda, see here.
Note
Python version above 3.8 is tested only in Ubuntu and Mac OS. For Windows 10, some of the dependencies were not yet compatible.
The easiest way to install PyElastica is with pip:
$ pip install pyelastica
You can also download the source code for PyElastica directly from GitHub.
Dependencies
The core of PyElastica is developed using:
numpy
numba
scipy
tqdm
matplotlib (visualization)
Above packages will be installed along with PyElastica if you used pip to install.
If you have directly downloaded the source code, you must install these packages separately.
Workflow
When using PyElastica, users will setup a simulation in which they define a system of rods, define initial and boundary conditions on the rods, run the simulation, and then post-process the results. Here, we outline a typical template of using PyElastica.
Important
A note on notation: Like other FEA packages such as Abaqus, PyElastica does not enforce units. This means that you are required to make sure that all units for your input variables are consistent. When in doubt, SI units are always safe, however, if you have a very small length scale (\(\sim\) nm), then you may need to rescale your units to avoid needing prohibitively small time steps and/or roundoff errors.
1. Setup Simulation
from elastica.wrappers import (
BaseSystemCollection,
Connections,
Constraints,
Forcing,
CallBacks
)
class SystemSimulator(
BaseSystemCollection,
Constraints, # Enabled to use boundary conditions 'OneEndFixedBC'
Forcing, # Enabled to use forcing 'GravityForces'
Connections, # Enabled to use FixedJoint
CallBacks # Enabled to use callback
):
pass
This simply combines all the wrappers previously imported together. If a wrapper is not needed for the simulation, it does not need to be added here.
Available components are:
Component |
Note |
|---|---|
BaseSystemCollection |
Required for all simulator. |
Note
We adopted a composition and mixin design paradigm in building elastica. The detail of the implementation is not important in using the package, but we left some references to read here.
2. Create Rods
Each rod has a number of physical parameters that need to be defined. These values then need to be assigned to the rod to create the object, and the rod needs to be added to the simulator.from elastica.rod.cosserat_rod import CosseratRod
# Create rod
direction = np.array([0.0, 0.0, 1.0])
normal = np.array([0.0, 1.0, 0.0])
rod1 = CosseratRod.straight_rod(
n_elements=50, # number of elements
start=np.array([0.0, 0.0, 0.0]), # Starting position of first node in rod
direction=direction, # Direction the rod extends
normal=normal, # normal vector of rod
base_length=0.5, # original length of rod (m)
base_radius=10e-2, # original radius of rod (m)
density=1e3, # density of rod (kg/m^3)
nu=1e-3, # Energy dissipation of rod
youngs_modulus=1e7, # Elastic Modulus (Pa)
poisson_ratio=0.5, # Poisson Ratio
)
rod2 = CosseratRod.straight_rod(
n_elements=50, # number of elements
start=np.array([0.0, 0.0, 0.5]), # Starting position of first node in rod
direction=direction, # Direction the rod extends
normal=normal, # normal vector of rod
base_length=0.5, # original length of rod (m)
base_radius=10e-2, # original radius of rod (m)
density=1e3, # density of rod (kg/m^3)
nu=1e-3, # Energy dissipation of rod
youngs_modulus=1e7, # Elastic Modulus (Pa)
poisson_ratio=0.5, # Poisson Ratio
)
# Add rod to SystemSimulator
SystemSimulator.append(rod1)
SystemSimulator.append(rod2)
This can be repeated to create multiple rods. Supported geometries are listed in API documentation.
Note
The number of element (n_elements) and base_length determines the spatial discretization dx. More detail discussion is included here.
4. Define Boundary Conditions, Forcings, and Connections
Now that we have added all our rods to SystemSimulator, we need to apply the relevant boundary conditions. See this page for in-depth explanations and documentation.
As a simple example, to fix one end of a rod, we use the OneEndFixedBC boundary condition (which we imported in step 1 and apply it to the rod. Here we will be fixing the \(0^{\text{th}}\) node as well as the \(0^{\text{th}}\) element.
from elastica.boundary_conditions import OneEndFixedBC
SystemSimulator.constrain(rod1).using(
OneEndFixedBC, # Displacement BC being applied
constrained_position_idx=(0,), # Node number to apply BC
constrained_director_idx=(0,) # Element number to apply BC
)
We have now fixed one end of the rod while leaving the other end free. We can also apply forces to free end using the EndpointForces. We can also add more complex forcings, such as friction, gravity, or torque throughout the rod. See this page for in-depth explanations and documentation.
from elastica.external_forces import EndpointForces
#Define 1x3 array of the applied forces
origin_force = np.array([0.0, 0.0, 0.0])
end_force = np.array([-15.0, 0.0, 0.0])
SystemSimulator.add_forcing_to(rod1).using(
EndpointForces, # Traction BC being applied
origin_force, # Force vector applied at first node
end_force, # Force vector applied at last node
ramp_up_time=final_time / 2.0 # Ramp up time
)
One last condition we can define is the connections between rods. See this page for in-depth explanations and documentation.
from elastica.connections import FixedJoint
# Connect rod 1 and rod 2. '_connect_idx' specifies the node number that
# the connection should be applied to. You are specifying the index of a
# list so you can use -1 to access the last node.
SystemSimulator.connect(
first_rod = rod1,
second_rod = rod2,
first_connect_idx = -1, # Connect to the last node of the first rod.
second_connect_idx = 0 # Connect to first node of the second rod.
).using(
FixedJoint, # Type of connection between rods
k = 1e5, # Spring constant of force holding rods together (F = k*x)
nu = 0, # Energy dissipation of joint
kt = 5e3 # Rotational stiffness of rod to avoid rods twisting
)
5. Add Callback Functions (optional)
If you want to know what happens to the rod during the course of the simulation, you must collect data during the simulation. Here, we demonstrate how the callback function can be defined to export the data you need. There is a base class CallBackBaseClass that can help with this.
Note
PyElastica does not automatically saves the simulation result. If you do not define a callback function, you will only have the final state of the system at the end of the simulation.
from elastica.callback_functions import CallBackBaseClass
# MyCallBack class is derived from the base call back class.
class MyCallBack(CallBackBaseClass):
def __init__(self, step_skip: int, callback_params):
CallBackBaseClass.__init__(self)
self.every = step_skip
self.callback_params = callback_params
# This function is called every time step
def make_callback(self, system, time, current_step: int):
if current_step % self.every == 0:
# Save time, step number, position, orientation and velocity
self.callback_params["time"].append(time)
self.callback_params["step"].append(current_step)
self.callback_params["position" ].append(system.position_collection.copy())
self.callback_params["directors"].append(system.director_collection.copy())
self.callback_params["velocity" ].append(system.velocity_collection.copy())
return
# Create dictionary to hold data from callback function
callback_data_rod1, callback_data_rod2 = defaultdict(list), defaultdict(list)
# Add MyCallBack to SystemSimulator for each rod telling it how often to save data (step_skip)
SystemSimulator.collect_diagnostics(rod1).using(
MyCallBack, step_skip=1000, callback_params=callback_data_rod1)
SystemSimulator.collect_diagnostics(rod2).using(
MyCallBack, step_skip=1000, callback_params=callback_data_rod2)
You can define different callback functions for different rods and also have different data outputted at different time step intervals depending on your needs. See this page for more in-depth documentation.
6. Finalize Simulator
Now that we have finished defining our rods, the different boundary conditions and connections between them, and how often we want to save data, we have finished setting up the simulation. We now need to finalize the simulator by calling
SystemSimulator.finalize()
This goes through and collects all the rods and applied conditions, preparing the system for the simulation.
7. Set Timestepper
With our system now ready to be run, we need to define which time stepping algorithm to use. Currently, we suggest using the position Verlet algorithm. We also need to define how much time we want to simulate as well as either the time step (dt) or the number of total time steps we want to take. Once we have defined these things, we can run the simulation by calling integrate(), which will start the simulation.
We are still actively testing different integration and time-stepping techniques,
PositionVerletis the best default at this moment.
from elastica.timestepper.symplectic_steppers import PositionVerlet
from elastica.timestepper import integrate
timestepper = PositionVerlet()
final_time = 10 # seconds
dt = 1e-5 # seconds
total_steps = int(final_time / dt)
integrate(timestepper, SystemSimulator, final_time, total_steps)
More documentation on timestepper and integrator is included here
8. Post Process
Once the simulation ends, it is time to analyze the data. If you defined a callback function, the data you outputted in available there (i.e. callback_data_rod1), otherwise you can access the final configuration of your system through your rod objects. For example, if you want the final position of one of your rods, you can get it from rod1.position_collection[:].
Discretization
To help get you started building initial intuition about PyElastica, here are some general rules of thumb to follow.
Important
These are based on general observations of how simulations tend to behave and are not guaranteed to always hold. Particularly for choosing dx and dt, it is important to perform a separate convergence study for your specific case.
Number of elements per rod
Generally, the more flexible your rod, the more elements you need. It is important to always perform a convergence test for your simulation, however, 30-50 elements per rod is a good starting point.
Choosing your dx and dt
Generally you will set your dx and then choose a stable dt. Your dx will be a combination of your problems length scale and the number of elements you want. Recall that units can be rescaled as long as they are consistent. If you have have a small rod, selecting a dx on the order of nm without scaling is 1e-9. This small value can cause numerical issues, so it is better to rescale your units so that nm \(\sim O(1)\).
When choosing your time step, there are a number of different conditions that can affect your choice. The most important consideration is that the time stepping algorithm remain stable. As a useful heuristic, we have found that dt = 0.01 dx \(s/m\) tends to yield stable time steps, but depending on your problem this may not hold. If you wish to be able to resolve the propagation of different waves, then you need to make sure your dt is able to capture their propagation (\(dt = dx \sqrt{\rho/G}\) for shear waves or \(dt = dx \sqrt{\rho/E}\) for flexural waves).
Run time scaling
PyElastica will scale linearly with the number of time steps, so if you halve your time step, your simulation will take twice as long to finish.
The algorithms that PyElastica is based on scale linearly with the number of elements. However, due to overhead from calling functions in Python, PyElastica does not currently have a strong dependence on the number of nodes. Doubling the number of nodes may only lead to a 10-20% increase in run time. While this means you can decrease your dx without a large run time penalty, remember that you also need to adjust your dt, which will affect the run time.
Adding additional interactions with the environment, such as friction or gravity, will increase run time. Most of these interactions only have a small effect on run time except for rod collision and/or self-intersection. As implemented, these are expensive routines (\(O(N^2)\)) and should be avoided if possible as they will substantially lengthen your run time.
We are working to add parallel and HPC capabilities to PyElastica. If you are interested in helping us implement these changes, let us know.
Example Cases
Example cases are the demonstration of physical example with known analytical solution or well-studied phenomenon. Each cases follows the recommended workflow, shown here. Feel free to use them as an initial template to build your own case study.
Axial Stretching
1""" Axial stretching test-case
2
3 Assume we have a rod lying aligned in the x-direction, with high internal
4 damping.
5
6 We fix one end (say, the left end) of the rod to a wall. On the right
7 end we apply a force directed axially pulling the rods tip. Linear
8 theory (assuming small displacements) predict that the net displacement
9 experienced by the rod tip is Δx = FL/AE where the symbols carry their
10 usual meaning (the rod is just a linear spring). We compare our results
11 with the above result.
12
13 We can "improve" the theory by having a better estimate for the rod's
14 spring constant by assuming that it equilibriates under the new position,
15 with
16 Δx = F * (L + Δx)/ (A * E)
17 which results in Δx = (F*l)/(A*E - F). Our rod reaches equilibrium wrt to
18 this position.
19
20 Note that if the damping is not high, the rod oscillates about the eventual
21 resting position (and this agrees with the theoretical predictions without
22 any damping : we should see the rod oscillating simple-harmonically in time).
23
24 isort:skip_file
25"""
26# FIXME without appending sys.path make it more generic
27import sys
28
29sys.path.append("../../") # isort:skip
30
31# from collections import defaultdict
32
33# import numpy as np
34from matplotlib import pyplot as plt
35
36from elastica import *
37
38
39class StretchingBeamSimulator(BaseSystemCollection, Constraints, Forcing, CallBacks):
40 pass
41
42
43stretch_sim = StretchingBeamSimulator()
44final_time = 20.0
45
46# Options
47PLOT_FIGURE = True
48SAVE_FIGURE = False
49SAVE_RESULTS = False
50
51# setting up test params
52n_elem = 19
53start = np.zeros((3,))
54direction = np.array([1.0, 0.0, 0.0])
55normal = np.array([0.0, 1.0, 0.0])
56base_length = 1.0
57base_radius = 0.025
58base_area = np.pi * base_radius ** 2
59density = 1000
60nu = 2.0
61youngs_modulus = 1e4
62# For shear modulus of 1e4, nu is 99!
63poisson_ratio = 0.5
64
65stretchable_rod = CosseratRod.straight_rod(
66 n_elem,
67 start,
68 direction,
69 normal,
70 base_length,
71 base_radius,
72 density,
73 nu,
74 youngs_modulus,
75 poisson_ratio,
76)
77
78stretch_sim.append(stretchable_rod)
79stretch_sim.constrain(stretchable_rod).using(
80 OneEndFixedBC, constrained_position_idx=(0,), constrained_director_idx=(0,)
81)
82
83end_force_x = 1.0
84end_force = np.array([end_force_x, 0.0, 0.0])
85stretch_sim.add_forcing_to(stretchable_rod).using(
86 EndpointForces, 0.0 * end_force, end_force, ramp_up_time=1e-2
87)
88
89# Add call backs
90class AxialStretchingCallBack(CallBackBaseClass):
91 """
92 Call back function for continuum snake
93 """
94
95 def __init__(self, step_skip: int, callback_params: dict):
96 CallBackBaseClass.__init__(self)
97 self.every = step_skip
98 self.callback_params = callback_params
99
100 def make_callback(self, system, time, current_step: int):
101
102 if current_step % self.every == 0:
103
104 self.callback_params["time"].append(time)
105 # Collect only x
106 self.callback_params["position"].append(
107 system.position_collection[0, -1].copy()
108 )
109 return
110
111
112recorded_history = defaultdict(list)
113stretch_sim.collect_diagnostics(stretchable_rod).using(
114 AxialStretchingCallBack, step_skip=200, callback_params=recorded_history
115)
116
117stretch_sim.finalize()
118timestepper = PositionVerlet()
119# timestepper = PEFRL()
120
121dl = base_length / n_elem
122dt = 0.01 * dl
123total_steps = int(final_time / dt)
124print("Total steps", total_steps)
125integrate(timestepper, stretch_sim, final_time, total_steps)
126
127if PLOT_FIGURE:
128 # First-order theory with base-length
129 expected_tip_disp = end_force_x * base_length / base_area / youngs_modulus
130 # First-order theory with modified-length, gives better estimates
131 expected_tip_disp_improved = (
132 end_force_x * base_length / (base_area * youngs_modulus - end_force_x)
133 )
134
135 fig = plt.figure(figsize=(10, 8), frameon=True, dpi=150)
136 ax = fig.add_subplot(111)
137 ax.plot(recorded_history["time"], recorded_history["position"], lw=2.0)
138 ax.hlines(base_length + expected_tip_disp, 0.0, final_time, "k", "dashdot", lw=1.0)
139 ax.hlines(
140 base_length + expected_tip_disp_improved, 0.0, final_time, "k", "dashed", lw=2.0
141 )
142 if SAVE_FIGURE:
143 fig.savefig("axial_stretching.pdf")
144 plt.show()
145
146if SAVE_RESULTS:
147 import pickle
148
149 filename = "axial_stretching_data.dat"
150 file = open(filename, "wb")
151 pickle.dump(stretchable_rod, file)
152 file.close()
Timoshenko
1__doc__ = """Timoshenko beam validation case, for detailed explanation refer to
2Gazzola et. al. R. Soc. 2018 section 3.4.3 """
3
4import numpy as np
5import sys
6
7# FIXME without appending sys.path make it more generic
8sys.path.append("../../")
9from elastica import *
10from examples.TimoshenkoBeamCase.timoshenko_postprocessing import plot_timoshenko
11
12
13class TimoshenkoBeamSimulator(BaseSystemCollection, Constraints, Forcing):
14 pass
15
16
17timoshenko_sim = TimoshenkoBeamSimulator()
18final_time = 5000
19
20# Options
21PLOT_FIGURE = True
22SAVE_FIGURE = False
23SAVE_RESULTS = False
24ADD_UNSHEARABLE_ROD = True
25
26# setting up test params
27n_elem = 100
28start = np.zeros((3,))
29direction = np.array([0.0, 0.0, 1.0])
30normal = np.array([0.0, 1.0, 0.0])
31base_length = 3.0
32base_radius = 0.25
33base_area = np.pi * base_radius ** 2
34density = 5000
35nu = 0.1
36E = 1e6
37# For shear modulus of 1e4, nu is 99!
38poisson_ratio = 99
39shear_modulus = E / (poisson_ratio + 1.0)
40
41shearable_rod = CosseratRod.straight_rod(
42 n_elem,
43 start,
44 direction,
45 normal,
46 base_length,
47 base_radius,
48 density,
49 nu,
50 E,
51 shear_modulus=shear_modulus,
52)
53
54timoshenko_sim.append(shearable_rod)
55timoshenko_sim.constrain(shearable_rod).using(
56 OneEndFixedBC, constrained_position_idx=(0,), constrained_director_idx=(0,)
57)
58
59end_force = np.array([-15.0, 0.0, 0.0])
60timoshenko_sim.add_forcing_to(shearable_rod).using(
61 EndpointForces, 0.0 * end_force, end_force, ramp_up_time=final_time / 2.0
62)
63
64
65if ADD_UNSHEARABLE_ROD:
66 # Start into the plane
67 unshearable_start = np.array([0.0, -1.0, 0.0])
68 shear_modulus = E / (-0.7 + 1.0)
69 unshearable_rod = CosseratRod.straight_rod(
70 n_elem,
71 unshearable_start,
72 direction,
73 normal,
74 base_length,
75 base_radius,
76 density,
77 nu,
78 E,
79 # Unshearable rod needs G -> inf, which is achievable with -ve poisson ratio
80 shear_modulus=shear_modulus,
81 )
82
83 timoshenko_sim.append(unshearable_rod)
84 timoshenko_sim.constrain(unshearable_rod).using(
85 OneEndFixedBC, constrained_position_idx=(0,), constrained_director_idx=(0,)
86 )
87 timoshenko_sim.add_forcing_to(unshearable_rod).using(
88 EndpointForces, 0.0 * end_force, end_force, ramp_up_time=final_time / 2.0
89 )
90
91timoshenko_sim.finalize()
92timestepper = PositionVerlet()
93# timestepper = PEFRL()
94
95dl = base_length / n_elem
96dt = 0.01 * dl
97total_steps = int(final_time / dt)
98print("Total steps", total_steps)
99integrate(timestepper, timoshenko_sim, final_time, total_steps)
100
101if PLOT_FIGURE:
102 plot_timoshenko(shearable_rod, end_force, SAVE_FIGURE, ADD_UNSHEARABLE_ROD)
103
104if SAVE_RESULTS:
105 import pickle
106
107 filename = "Timoshenko_beam_data.dat"
108 file = open(filename, "wb")
109 pickle.dump(shearable_rod, file)
110 file.close()
Butterfly
1# FIXME without appending sys.path make it more generic
2import sys
3
4sys.path.append("../")
5sys.path.append("../../")
6
7# from collections import defaultdict
8import numpy as np
9from matplotlib import pyplot as plt
10from matplotlib.colors import to_rgb
11
12
13from elastica import *
14from elastica.utils import MaxDimension
15
16
17class ButterflySimulator(BaseSystemCollection, CallBacks):
18 pass
19
20
21butterfly_sim = ButterflySimulator()
22final_time = 40.0
23
24# Options
25PLOT_FIGURE = True
26SAVE_FIGURE = True
27SAVE_RESULTS = True
28ADD_UNSHEARABLE_ROD = False
29
30# setting up test params
31# FIXME : Doesn't work with elements > 10 (the inverse rotate kernel fails)
32n_elem = 4 # Change based on requirements, but be careful
33n_elem += n_elem % 2
34half_n_elem = n_elem // 2
35
36origin = np.zeros((3, 1))
37angle_of_inclination = np.deg2rad(45.0)
38
39# in-plane
40horizontal_direction = np.array([0.0, 0.0, 1.0]).reshape(-1, 1)
41vertical_direction = np.array([1.0, 0.0, 0.0]).reshape(-1, 1)
42
43# out-of-plane
44normal = np.array([0.0, 1.0, 0.0])
45
46total_length = 3.0
47base_radius = 0.25
48base_area = np.pi * base_radius ** 2
49density = 5000
50nu = 0.0
51youngs_modulus = 1e4
52poisson_ratio = 0.5
53
54positions = np.empty((MaxDimension.value(), n_elem + 1))
55dl = total_length / n_elem
56
57# First half of positions stem from slope angle_of_inclination
58first_half = np.arange(half_n_elem + 1.0).reshape(1, -1)
59positions[..., : half_n_elem + 1] = origin + dl * first_half * (
60 np.cos(angle_of_inclination) * horizontal_direction
61 + np.sin(angle_of_inclination) * vertical_direction
62)
63positions[..., half_n_elem:] = positions[
64 ..., half_n_elem : half_n_elem + 1
65] + dl * first_half * (
66 np.cos(angle_of_inclination) * horizontal_direction
67 - np.sin(angle_of_inclination) * vertical_direction
68)
69
70butterfly_rod = CosseratRod.straight_rod(
71 n_elem,
72 start=origin.reshape(3),
73 direction=np.array([0.0, 0.0, 1.0]),
74 normal=normal,
75 base_length=total_length,
76 base_radius=base_radius,
77 density=density,
78 nu=nu,
79 youngs_modulus=youngs_modulus,
80 poisson_ratio=poisson_ratio,
81 position=positions,
82)
83
84butterfly_sim.append(butterfly_rod)
85
86# Add call backs
87class VelocityCallBack(CallBackBaseClass):
88 """
89 Call back function for continuum snake
90 """
91
92 def __init__(self, step_skip: int, callback_params: dict):
93 CallBackBaseClass.__init__(self)
94 self.every = step_skip
95 self.callback_params = callback_params
96
97 def make_callback(self, system, time, current_step: int):
98
99 if current_step % self.every == 0:
100
101 self.callback_params["time"].append(time)
102 # Collect x
103 self.callback_params["position"].append(system.position_collection.copy())
104 # Collect energies as well
105 self.callback_params["te"].append(system.compute_translational_energy())
106 self.callback_params["re"].append(system.compute_rotational_energy())
107 self.callback_params["se"].append(system.compute_shear_energy())
108 self.callback_params["be"].append(system.compute_bending_energy())
109 return
110
111
112recorded_history = defaultdict(list)
113# initially record history
114recorded_history["time"].append(0.0)
115recorded_history["position"].append(butterfly_rod.position_collection.copy())
116recorded_history["te"].append(butterfly_rod.compute_translational_energy())
117recorded_history["re"].append(butterfly_rod.compute_rotational_energy())
118recorded_history["se"].append(butterfly_rod.compute_shear_energy())
119recorded_history["be"].append(butterfly_rod.compute_bending_energy())
120
121butterfly_sim.collect_diagnostics(butterfly_rod).using(
122 VelocityCallBack, step_skip=100, callback_params=recorded_history
123)
124
125
126butterfly_sim.finalize()
127timestepper = PositionVerlet()
128# timestepper = PEFRL()
129
130dt = 0.01 * dl
131total_steps = int(final_time / dt)
132print("Total steps", total_steps)
133integrate(timestepper, butterfly_sim, final_time, total_steps)
134
135if PLOT_FIGURE:
136 # Plot the histories
137 fig = plt.figure(figsize=(5, 4), frameon=True, dpi=150)
138 ax = fig.add_subplot(111)
139 positions = recorded_history["position"]
140 # record first position
141 first_position = positions.pop(0)
142 ax.plot(first_position[2, ...], first_position[0, ...], "r--", lw=2.0)
143 n_positions = len(positions)
144 for i, pos in enumerate(positions):
145 alpha = np.exp(i / n_positions - 1)
146 ax.plot(pos[2, ...], pos[0, ...], "b", lw=0.6, alpha=alpha)
147 # final position is also separate
148 last_position = positions.pop()
149 ax.plot(last_position[2, ...], last_position[0, ...], "k--", lw=2.0)
150 # don't block
151 fig.show()
152
153 # Plot the energies
154 energy_fig = plt.figure(figsize=(5, 4), frameon=True, dpi=150)
155 energy_ax = energy_fig.add_subplot(111)
156 times = np.asarray(recorded_history["time"])
157 te = np.asarray(recorded_history["te"])
158 re = np.asarray(recorded_history["re"])
159 be = np.asarray(recorded_history["be"])
160 se = np.asarray(recorded_history["se"])
161
162 energy_ax.plot(times, te, c=to_rgb("xkcd:reddish"), lw=2.0, label="Translations")
163 energy_ax.plot(times, re, c=to_rgb("xkcd:bluish"), lw=2.0, label="Rotation")
164 energy_ax.plot(times, be, c=to_rgb("xkcd:burple"), lw=2.0, label="Bend")
165 energy_ax.plot(times, se, c=to_rgb("xkcd:goldenrod"), lw=2.0, label="Shear")
166 energy_ax.plot(times, te + re + be + se, c="k", lw=2.0, label="Total energy")
167 energy_ax.legend()
168 # don't block
169 energy_fig.show()
170
171 if SAVE_FIGURE:
172 fig.savefig("butterfly.png")
173 energy_fig.savefig("energies.png")
174
175 plt.show()
176
177if SAVE_RESULTS:
178 import pickle
179
180 filename = "butterfly_data.dat"
181 file = open(filename, "wb")
182 pickle.dump(butterfly_rod, file)
183 file.close()
Helical Buckling
1__doc__ = """Helical buckling validation case, for detailed explanation refer to
2Gazzola et. al. R. Soc. 2018 section 3.4.1 """
3
4import numpy as np
5import sys
6
7# FIXME without appending sys.path make it more generic
8sys.path.append("../../")
9from elastica import *
10from examples.HelicalBucklingCase.helicalbuckling_postprocessing import (
11 plot_helicalbuckling,
12)
13
14
15class HelicalBucklingSimulator(BaseSystemCollection, Constraints, Forcing):
16 pass
17
18
19helicalbuckling_sim = HelicalBucklingSimulator()
20
21# Options
22PLOT_FIGURE = True
23SAVE_FIGURE = True
24SAVE_RESULTS = False
25
26# setting up test params
27n_elem = 100
28start = np.zeros((3,))
29direction = np.array([0.0, 0.0, 1.0])
30normal = np.array([0.0, 1.0, 0.0])
31base_length = 100.0
32base_radius = 0.35
33base_area = np.pi * base_radius ** 2
34density = 1.0 / (base_area)
35nu = 0.01
36E = 1e6
37slack = 3
38number_of_rotations = 27
39# For shear modulus of 1e5, nu is 99!
40poisson_ratio = 9
41shear_modulus = E / (poisson_ratio + 1.0)
42shear_matrix = np.repeat(
43 shear_modulus * np.identity((3))[:, :, np.newaxis], n_elem, axis=2
44)
45temp_bend_matrix = np.zeros((3, 3))
46np.fill_diagonal(temp_bend_matrix, [1.345, 1.345, 0.789])
47bend_matrix = np.repeat(temp_bend_matrix[:, :, np.newaxis], n_elem - 1, axis=2)
48
49shearable_rod = CosseratRod.straight_rod(
50 n_elem,
51 start,
52 direction,
53 normal,
54 base_length,
55 base_radius,
56 density,
57 nu,
58 E,
59 shear_modulus=shear_modulus,
60)
61# TODO: CosseratRod has to be able to take shear matrix as input, we should change it as done below
62
63shearable_rod.shear_matrix = shear_matrix
64shearable_rod.bend_matrix = bend_matrix
65
66
67helicalbuckling_sim.append(shearable_rod)
68helicalbuckling_sim.constrain(shearable_rod).using(
69 HelicalBucklingBC,
70 constrained_position_idx=(0, -1),
71 constrained_director_idx=(0, -1),
72 twisting_time=500,
73 slack=slack,
74 number_of_rotations=number_of_rotations,
75)
76
77helicalbuckling_sim.finalize()
78timestepper = PositionVerlet()
79shearable_rod.velocity_collection[..., int((n_elem) / 2)] += np.array([0, 1e-6, 0.0])
80# timestepper = PEFRL()
81
82final_time = 10500.0
83dl = base_length / n_elem
84dt = 1e-3 * dl
85total_steps = int(final_time / dt)
86print("Total steps", total_steps)
87integrate(timestepper, helicalbuckling_sim, final_time, total_steps)
88
89if PLOT_FIGURE:
90 plot_helicalbuckling(shearable_rod, SAVE_FIGURE)
91
92if SAVE_RESULTS:
93 import pickle
94
95 filename = "HelicalBuckling_data.dat"
96 file = open(filename, "wb")
97 pickle.dump(shearable_rod, file)
98 file.close()
Continuum Snake
1__doc__ = """Snake friction case from X. Zhang et. al. Nat. Comm. 2021"""
2
3import sys
4
5sys.path.append("../../")
6from elastica import *
7
8from examples.ContinuumSnakeCase.continuum_snake_postprocessing import (
9 plot_snake_velocity,
10 plot_video,
11 compute_projected_velocity,
12 plot_curvature,
13)
14
15
16class SnakeSimulator(BaseSystemCollection, Constraints, Forcing, CallBacks):
17 pass
18
19
20def run_snake(
21 b_coeff, PLOT_FIGURE=False, SAVE_FIGURE=False, SAVE_VIDEO=False, SAVE_RESULTS=False
22):
23 # Initialize the simulation class
24 snake_sim = SnakeSimulator()
25
26 # Simulation parameters
27 period = 2
28 final_time = (11.0 + 0.01) * period
29 time_step = 8e-6
30 total_steps = int(final_time / time_step)
31 rendering_fps = 60
32 step_skip = int(1.0 / (rendering_fps * time_step))
33
34 # setting up test params
35 n_elem = 50
36 start = np.zeros((3,))
37 direction = np.array([0.0, 0.0, 1.0])
38 normal = np.array([0.0, 1.0, 0.0])
39 base_length = 0.35
40 base_radius = base_length * 0.011
41 density = 1000
42 nu = 1e-4
43 E = 1e6
44 poisson_ratio = 0.5
45 shear_modulus = E / (poisson_ratio + 1.0)
46
47 shearable_rod = CosseratRod.straight_rod(
48 n_elem,
49 start,
50 direction,
51 normal,
52 base_length,
53 base_radius,
54 density,
55 nu,
56 E,
57 shear_modulus=shear_modulus,
58 )
59
60 snake_sim.append(shearable_rod)
61
62 # Add gravitational forces
63 gravitational_acc = -9.80665
64 snake_sim.add_forcing_to(shearable_rod).using(
65 GravityForces, acc_gravity=np.array([0.0, gravitational_acc, 0.0])
66 )
67
68 # Add muscle torques
69 wave_length = b_coeff[-1]
70 snake_sim.add_forcing_to(shearable_rod).using(
71 MuscleTorques,
72 base_length=base_length,
73 b_coeff=b_coeff[:-1],
74 period=period,
75 wave_number=2.0 * np.pi / (wave_length),
76 phase_shift=0.0,
77 rest_lengths=shearable_rod.rest_lengths,
78 ramp_up_time=period,
79 direction=normal,
80 with_spline=True,
81 )
82
83 # Add friction forces
84 origin_plane = np.array([0.0, -base_radius, 0.0])
85 normal_plane = normal
86 slip_velocity_tol = 1e-8
87 froude = 0.1
88 mu = base_length / (period * period * np.abs(gravitational_acc) * froude)
89 kinetic_mu_array = np.array(
90 [mu, 1.5 * mu, 2.0 * mu]
91 ) # [forward, backward, sideways]
92 static_mu_array = np.zeros(kinetic_mu_array.shape)
93 snake_sim.add_forcing_to(shearable_rod).using(
94 AnisotropicFrictionalPlane,
95 k=1.0,
96 nu=1e-6,
97 plane_origin=origin_plane,
98 plane_normal=normal_plane,
99 slip_velocity_tol=slip_velocity_tol,
100 static_mu_array=static_mu_array,
101 kinetic_mu_array=kinetic_mu_array,
102 )
103
104 # Add call backs
105 class ContinuumSnakeCallBack(CallBackBaseClass):
106 """
107 Call back function for continuum snake
108 """
109
110 def __init__(self, step_skip: int, callback_params: dict):
111 CallBackBaseClass.__init__(self)
112 self.every = step_skip
113 self.callback_params = callback_params
114
115 def make_callback(self, system, time, current_step: int):
116
117 if current_step % self.every == 0:
118
119 self.callback_params["time"].append(time)
120 self.callback_params["step"].append(current_step)
121 self.callback_params["position"].append(
122 system.position_collection.copy()
123 )
124 self.callback_params["velocity"].append(
125 system.velocity_collection.copy()
126 )
127 self.callback_params["avg_velocity"].append(
128 system.compute_velocity_center_of_mass()
129 )
130
131 self.callback_params["center_of_mass"].append(
132 system.compute_position_center_of_mass()
133 )
134 self.callback_params["curvature"].append(system.kappa.copy())
135
136 return
137
138 pp_list = defaultdict(list)
139 snake_sim.collect_diagnostics(shearable_rod).using(
140 ContinuumSnakeCallBack, step_skip=step_skip, callback_params=pp_list
141 )
142
143 snake_sim.finalize()
144
145 timestepper = PositionVerlet()
146 integrate(timestepper, snake_sim, final_time, total_steps)
147
148 if PLOT_FIGURE:
149 filename_plot = "continuum_snake_velocity.png"
150 plot_snake_velocity(pp_list, period, filename_plot, SAVE_FIGURE)
151 plot_curvature(pp_list, shearable_rod.rest_lengths, period, SAVE_FIGURE)
152
153 if SAVE_VIDEO:
154 filename_video = "continuum_snake.mp4"
155 plot_video(
156 pp_list,
157 video_name=filename_video,
158 fps=rendering_fps,
159 xlim=(0, 4),
160 ylim=(-1, 1),
161 )
162
163 if SAVE_RESULTS:
164 import pickle
165
166 filename = "continuum_snake.dat"
167 file = open(filename, "wb")
168 pickle.dump(pp_list, file)
169 file.close()
170
171 # Compute the average forward velocity. These will be used for optimization.
172 [_, _, avg_forward, avg_lateral] = compute_projected_velocity(pp_list, period)
173
174 return avg_forward, avg_lateral, pp_list
175
176
177if __name__ == "__main__":
178
179 # Options
180 PLOT_FIGURE = True
181 SAVE_FIGURE = True
182 SAVE_VIDEO = True
183 SAVE_RESULTS = False
184 CMA_OPTION = False
185
186 if CMA_OPTION:
187 import cma
188
189 SAVE_OPTIMIZED_COEFFICIENTS = False
190
191 def optimize_snake(spline_coefficient):
192 [avg_forward, _, _] = run_snake(
193 spline_coefficient,
194 PLOT_FIGURE=False,
195 SAVE_FIGURE=False,
196 SAVE_VIDEO=False,
197 SAVE_RESULTS=False,
198 )
199 return -avg_forward
200
201 # Optimize snake for forward velocity. In cma.fmin first input is function
202 # to be optimized, second input is initial guess for coefficients you are optimizing
203 # for and third input is standard deviation you initially set.
204 optimized_spline_coefficients = cma.fmin(optimize_snake, 7 * [0], 0.5)
205
206 # Save the optimized coefficients to a file
207 filename_data = "optimized_coefficients.txt"
208 if SAVE_OPTIMIZED_COEFFICIENTS:
209 assert filename_data != "", "provide a file name for coefficients"
210 np.savetxt(filename_data, optimized_spline_coefficients, delimiter=",")
211
212 else:
213 # Add muscle forces on the rod
214 if os.path.exists("optimized_coefficients.txt"):
215 t_coeff_optimized = np.genfromtxt(
216 "optimized_coefficients.txt", delimiter=","
217 )
218 else:
219 wave_length = 1.0
220 t_coeff_optimized = np.array(
221 [3.4e-3, 3.3e-3, 4.2e-3, 2.6e-3, 3.6e-3, 3.5e-3]
222 )
223 t_coeff_optimized = np.hstack((t_coeff_optimized, wave_length))
224
225 # run the simulation
226 [avg_forward, avg_lateral, pp_list] = run_snake(
227 t_coeff_optimized, PLOT_FIGURE, SAVE_FIGURE, SAVE_VIDEO, SAVE_RESULTS
228 )
229
230 print("average forward velocity:", avg_forward)
231 print("average forward lateral:", avg_lateral)
PyBind Tutorials
We have created several Jupyter notebooks and Python scripts to help get users started with using PyElastica. The Jupyter notebooks are available on Binder, allowing you to try out some of the tutorials without having to install PyElastica.
![]()
Note
Additional examples are also available in the examples folder of PyElastica’s Github repo.
Visualization
Matplotlib
If you wish to visualize your system, make sure you define your callback function to output all necessary data. You can either plot your data using a python package such as matplotlib, or any rendering software that you choose. Note, many of the visualization scripts in the examples folders require ffmpeg (be sure to install with h264 libraries).
POVray
For high-quality visualization, we suggest POVray. See this tutorial for examples of different ways of visualizing the system.
Rhino
For interactive visualization and rendering, we use Rhino + Grasshopper. See this extension.
VTK
The current version does not have VTK-export capability, although we plan to include this feature later.
Rods
Base class for rods
- class elastica.rod.rod_base.RodBase[source]
Base class for all rods.
Notes
All new rod classes must be derived from this RodBase class.
Cosserat Rod
On Nodes (+1) |
On Elements (n_elements) |
On Voronoi (-1) |
|
|---|---|---|---|
Geometry |
position |
director, tangents
length, rest_length
radius
volume
dilatation
|
rest voronoi length
voronoi dilatation
|
Kinematics |
velocity
acceleration
external forces
damping forces
|
angular velocity (omega)
angular acceleration (alpha)
mass second moment of inertia
+inverse
dilatation rates
external torques
damping torques
|
|
Elasticity |
internal forces |
shear matrix (modulus)
shear/stretch strain (sigma)
rest shear/stretch strain
internal torques
internal stress
|
bend matrix (modulus)
bend/twist strain (kappa)
rest bend/twist strain
internal couple
|
Material |
mass |
density
dissipation constant (force, torque)
|
Rod classes and implementation details
- class elastica.rod.cosserat_rod.CosseratRod(n_elements, position, velocity, omega, acceleration, angular_acceleration, directors, radius, mass_second_moment_of_inertia, inv_mass_second_moment_of_inertia, shear_matrix, bend_matrix, density, volume, mass, dissipation_constant_for_forces, dissipation_constant_for_torques, internal_forces, internal_torques, external_forces, external_torques, lengths, rest_lengths, tangents, dilatation, dilatation_rate, voronoi_dilatation, rest_voronoi_lengths, sigma, kappa, rest_sigma, rest_kappa, internal_stress, internal_couple, damping_forces, damping_torques)[source]
Cosserat Rod class. This is the preferred class for rods because it is derived from some of the essential base classes.
- Attributes
- n_elems: int
The number of elements of the rod.
- position_collection: numpy.ndarray
2D (dim, n_nodes) array containing data with ‘float’ type. Array containing node position vectors.
- velocity_collection: numpy.ndarray
2D (dim, n_nodes) array containing data with ‘float’ type. Array containing node velocity vectors.
- acceleration_collection: numpy.ndarray
2D (dim, n_nodes) array containing data with ‘float’ type. Array containing node acceleration vectors.
- omega_collection: numpy.ndarray
2D (dim, n_elems) array containing data with ‘float’ type. Array containing element angular velocity vectors.
- alpha_collection: numpy.ndarray
2D (dim, n_elems) array containing data with ‘float’ type. Array contining element angular acceleration vectors.
- director_collection: numpy.ndarray
3D (dim, dim, n_elems) array containing data with ‘float’ type. Array containing element director matrices.
- rest_lengths: numpy.ndarray
1D (n_elems) array containing data with ‘float’ type. Rod element lengths at rest configuration.
- density: numpy.ndarray
1D (n_elems) array containing data with ‘float’ type. Rod elements densities.
- volume: numpy.ndarray
1D (n_elems) array containing data with ‘float’ type. Rod element volumes.
- mass: numpy.ndarray
1D (n_nodes) array containing data with ‘float’ type. Rod node masses. Note that masses are stored on the nodes, not on elements.
- mass_second_moment_of_inertia: numpy.ndarray
3D (dim, dim, n_elems) array containing data with ‘float’ type. Rod element mass second moment of interia.
- inv_mass_second_moment_of_inertia: numpy.ndarray
3D (dim, dim, n_elems) array containing data with ‘float’ type. Rod element inverse mass moment of inertia.
- dissipation_constant_for_forces: numpy.ndarray
1D (n_elems) array containing data with ‘float’ type. Rod element dissipation coefficient (nu).
- dissipation_constant_for_torques: numpy.ndarray
1D (n_elems) array containing data with ‘float’ type. Rod element dissipation (nu). Can be customized by passing ‘nu_for_torques’.
- rest_voronoi_lengths: numpy.ndarray
1D (n_voronoi) array containing data with ‘float’ type. Rod lengths on the voronoi domain at the rest configuration.
- internal_forces: numpy.ndarray
2D (dim, n_nodes) array containing data with ‘float’ type. Rod node internal forces. Note that internal forces are stored on the node, not on elements.
- internal_torques: numpy.ndarray
2D (dim, n_elems) array containing data with ‘float’ type. Rod element internal torques.
- external_forces: numpy.ndarray
2D (dim, n_nodes) array containing data with ‘float’ type. External forces acting on rod nodes.
- external_torques: numpy.ndarray
2D (dim, n_elems) array containing data with ‘float’ type. External torques acting on rod elements.
- lengths: numpy.ndarray
1D (n_elems) array containing data with ‘float’ type. Rod element lengths.
- tangents: numpy.ndarray
2D (dim, n_elems) array containing data with ‘float’ type. Rod element tangent vectors.
- radius: numpy.ndarray
1D (n_elems) array containing data with ‘float’ type. Rod element radius.
- dilatation: numpy.ndarray
1D (n_elems) array containing data with ‘float’ type. Rod element dilatation.
- voronoi_dilatation: numpy.ndarray
1D (n_voronoi) array containing data with ‘float’ type. Rod dilatation on voronoi domain.
- dilatation_rate: numpy.ndarray
1D (n_elems) array containing data with ‘float’ type. Rod element dilatation rates.
- compute_position_center_of_mass()[source]
Compute position center of mass of the rod at the instance.
- compute_translational_energy()[source]
Compute total translational energy of the rod at the instance.
- compute_velocity_center_of_mass()[source]
Compute velocity center of mass of the rod at the instance.
- classmethod straight_rod(n_elements, start, direction, normal, base_length, base_radius, density, nu, youngs_modulus, *args, **kwargs)[source]
Cosserat rod constructor for straight-rod geometry.
- Parameters
- n_elementsint
Number of element. Must be greater than 3. Generarally recommended to start with 40-50, and adjust the resolution.
- startNDArray[3, float]
Starting coordinate in 3D
- directionNDArray[3, float]
Direction of the rod in 3D
- normalNDArray[3, float]
Normal vector of the rod in 3D
- base_lengthfloat
Total length of the rod
- base_radiusfloat
Uniform radius of the rod
- densityfloat
Density of the rod
- nufloat
Damping coefficient for Rayleigh damping
- youngs_modulusfloat
Young’s modulus
- *argstuple
Additional arguments should be passed as keyward arguments. (e.g. shear_modulus, poisson_ratio)
- **kwargsdict, optional
The “position” and/or “directors” can be overrided by passing “position” and “directors” argument. Remember, the shape of the “position” is (3,n_elements+1) and the shape of the “directors” is (3,3,n_elements).
- Returns
- CosseratRod
Notes
Since we expect the Cosserat Rod to simulate soft rod, Poisson’s ratio is set to 0.5 by default. It is possible to give additional argument “shear_modulus” or “poisson_ratio” to specify extra modulus.
Rigid Body
type |
|
|---|---|
Cylinder |
|
Sphere |
- class elastica.rigidbody.rigid_body.RigidBodyBase[source]
Base class for rigid body classes.
Notes
All rigid body class should inherit this base class.
Constraints
Built-in boundary condition implementationss
Description
Constraints are equivalent to displacement boundary condition.
Available Constraint
Base class for constraint and displacement boundary condition implementation. |
|
Boundary condition template. |
|
This boundary condition class fixes one end of the rod. |
|
This boundary condition class fixes the specified node or orientations. |
|
This is the boundary condition class for Helical Buckling case in Gazzola et. |
|
Deprecated 0.2.1: Same implementation as FreeBC |
|
Deprecated 0.2.1: Same implementation as OneEndFixedBC |
Compatibility
Constraint / Boundary Condition |
Rod |
Rigid Body |
|---|---|---|
FreeBC |
✅ |
✅ |
OneEndFixedBC |
✅ |
✅ |
FixedConstraint |
✅ |
✅ |
HelicalBucklingBC |
✅ |
❌ |
Examples
Note
PyElastica package provides basic built-in constraints, and we expect use to adapt their own boundary condition from our examples.
Customizing boundary condition examples:
Built-in Constraints
- class elastica.boundary_conditions.ConstraintBase(*args, **kwargs)[source]
Bases:
abc.ABCBase class for constraint and displacement boundary condition implementation.
Notes
Constraint class must inherit BaseConstraint class.
- Attributes
systemRodBase or RigidBodyBaseget system (rod or rigid body) reference
- node_indicesNone or numpy.ndarray
- element_indicesNone or numpy.ndarray
- abstract constrain_rates(rod, time)[source]
Constrain rates (velocity and/or omega) of a rod object.
- Parameters
- rodUnion[Type[RodBase], Type[RigidBodyBase]]
Rod or rigid-body object.
- timefloat
The time of simulation.
- :rtype:py:obj:None
- abstract constrain_values(rod, time)[source]
Constrain values (position and/or directors) of a rod object.
- Parameters
- rodUnion[Type[RodBase], Type[RigidBodyBase]]
Rod or rigid-body object.
- timefloat
The time of simulation.
- :rtype:py:obj:None
- property constrained_director_idx: Optional[numpy.ndarray]
get director-indices passed to “using”
- Return type
Optional[ndarray]
- property constrained_position_idx: Optional[numpy.ndarray]
get position-indices passed to “using”
- Return type
Optional[ndarray]
- property system: Union[Type[elastica.rod.rod_base.RodBase], Type[elastica.rigidbody.rigid_body.RigidBodyBase]]
get system (rod or rigid body) reference
- Return type
Union[Type[RodBase],Type[RigidBodyBase]]
- class elastica.boundary_conditions.OneEndFixedBC(fixed_position, fixed_directors, **kwargs)[source]
This boundary condition class fixes one end of the rod. Currently, this boundary condition fixes position and directors at the first node and first element of the rod.
Examples
How to fix one ends of the rod:
>>> simulator.constrain(rod).using( ... OneEndFixedBC, ... constrained_position_idx=(0,), ... constrained_director_idx=(0,) ... )
- __init__(fixed_position, fixed_directors, **kwargs)[source]
Initialization of the constraint. Any parameter passed to ‘using’ will be available in kwargs.
- Parameters
- constrained_position_idxtuple
Tuple of position-indices that will be constrained
- constrained_director_idxtuple
Tuple of director-indices that will be constrained
- class elastica.boundary_conditions.FixedConstraint(*fixed_data, **kwargs)[source]
This boundary condition class fixes the specified node or orientations. Index can be passed to fix either or both the position or the director. Constraining position is equivalent to setting 0 translational DOF. Constraining director is equivalent to setting 0 rotational DOF.
Examples
How to fix two ends of the rod:
>>> simulator.constrain(rod).using( ... FixedConstraint, ... constrained_position_idx=(0,1,-2,-1), ... constrained_director_idx=(0,-1) ... )
How to pin the middle of the rod (10th node), without constraining the rotational DOF.
>>> simulator.constrain(rod).using( ... FixedConstraint, ... constrained_position_idx=(10) ... )
- __init__(*fixed_data, **kwargs)[source]
Initialization of the constraint. Any parameter passed to ‘using’ will be available in kwargs.
- Parameters
- constrained_position_idxtuple
Tuple of position-indices that will be constrained
- constrained_director_idxtuple
Tuple of director-indices that will be constrained
- class elastica.boundary_conditions.HelicalBucklingBC(position_start, position_end, director_start, director_end, twisting_time, slack, number_of_rotations, **kwargs)[source]
This is the boundary condition class for Helical Buckling case in Gazzola et. al. RSoS (2018). The applied boundary condition is twist and slack on to the first and last nodes and elements of the rod.
Example case (helical buckling)
- Attributes
- twisting_time: float
Time to complete twist.
- final_start_position: numpy.ndarray
2D (dim, 1) array containing data with ‘float’ type. Position of first node of rod after twist completed.
- final_end_position: numpy.ndarray
2D (dim, 1) array containing data with ‘float’ type. Position of last node of rod after twist completed.
- ang_vel: numpy.ndarray
2D (dim, 1) array containing data with ‘float’ type. Angular velocity of rod during twisting time.
- shrink_vel: numpy.ndarray
2D (dim, 1) array containing data with ‘float’ type. Shrink velocity of rod during twisting time.
- final_start_directors: numpy.ndarray
3D (dim, dim, 1) array containing data with ‘float’ type. Directors of first element of rod after twist completed.
- final_end_directors: numpy.ndarray
3D (dim, dim, 1) array containing data with ‘float’ type. Directors of last element of rod after twist completed.
- __init__(position_start, position_end, director_start, director_end, twisting_time, slack, number_of_rotations, **kwargs)[source]
Helical Buckling initializer
- Parameters
- position_startnumpy.ndarray
2D (dim, 1) array containing data with ‘float’ type. Initial position of first node.
- position_endnumpy.ndarray
2D (dim, 1) array containing data with ‘float’ type. Initial position of last node.
- director_startnumpy.ndarray
3D (dim, dim, blocksize) array containing data with ‘float’ type. Initial director of first element.
- director_endnumpy.ndarray
3D (dim, dim, blocksize) array containing data with ‘float’ type. Initial director of last element.
- twisting_timefloat
Time to complete twist.
- slackfloat
Slack applied to rod.
- number_of_rotationsfloat
Number of rotations applied to rod.
External Forces / Interactions
Description
External force and environmental interaction are represented as force/torque bounaary condition at different location.
Available Forcing
Numba implementation module for boundary condition implementations that apply external forces to the rod.
This is the base class for external forcing boundary conditions applied to rod-like objects. |
|
This class applies constant forces on the endpoint nodes. |
|
This class applies a constant gravitational force to the entire rod. |
|
This class applies a uniform force to the entire rod. |
|
This class applies a uniform torque to the entire rod. |
|
This class applies muscle torques along the body. |
Available Interaction
Numba implementation module containing interactions between a rod and its environment.
This anisotropic friction plane class is for computing anisotropic friction forces on rods. |
|
The interaction plane class computes the plane reaction force on a rod-like object. |
|
This slender body theory class is for flow-structure interaction problems. |
Compatibility
Forcing |
Rod |
Rigid Body |
|---|---|---|
NoForces |
✅ |
✅ |
EndpointForces |
✅ |
✅ |
GravityForces |
✅ |
✅ |
UniformForces |
✅ |
✅ |
UniformTorques |
✅ |
✅ |
MuscleTorques |
✅ |
❌ |
Interaction |
Rod |
Rigid Body |
|---|---|---|
AnisotropicFrictionalPlane |
✅ |
❌ |
InteractionPlane |
✅ |
❌ |
SlenderBodyTheory |
✅ |
❌ |
Built-in External Forces
Numba implementation module for boundary condition implementations that apply external forces to the rod.
- class elastica.external_forces.NoForces[source]
This is the base class for external forcing boundary conditions applied to rod-like objects.
Notes
Every new external forcing class must be derived from NoForces class.
- class elastica.external_forces.EndpointForces(start_force, end_force, ramp_up_time=0.0)[source]
This class applies constant forces on the endpoint nodes.
- Attributes
- start_force: numpy.ndarray
2D (dim, 1) array containing data with ‘float’ type. Force applied to first node of the rod-like object.
- end_force: numpy.ndarray
2D (dim, 1) array containing data with ‘float’ type. Force applied to last node of the rod-like object.
- ramp_up_time: float
Applied forces are ramped up until ramp up time.
- __init__(start_force, end_force, ramp_up_time=0.0)[source]
- Parameters
- start_force: numpy.ndarray
2D (dim, 1) array containing data with ‘float’ type. Force applied to first node of the rod-like object.
- end_force: numpy.ndarray
2D (dim, 1) array containing data with ‘float’ type. Force applied to last node of the rod-like object.
- ramp_up_time: float
Applied forces are ramped up until ramp up time.
- class elastica.external_forces.GravityForces(acc_gravity=array([0.0, - 9.80665, 0.0]))[source]
This class applies a constant gravitational force to the entire rod.
- Attributes
- acc_gravity: numpy.ndarray
1D (dim) array containing data with ‘float’ type. Gravitational acceleration vector.
- class elastica.external_forces.UniformForces(force, direction=array([0.0, 0.0, 0.0]))[source]
This class applies a uniform force to the entire rod.
- Attributes
- force: numpy.ndarray
2D (dim, 1) array containing data with ‘float’ type. Total force applied to a rod-like object.
- class elastica.external_forces.UniformTorques(torque, direction=array([0.0, 0.0, 0.0]))[source]
This class applies a uniform torque to the entire rod.
- Attributes
- torque: numpy.ndarray
2D (dim, 1) array containing data with ‘float’ type. Total torque applied to a rod-like object.
- class elastica.external_forces.MuscleTorques(base_length, b_coeff, period, wave_number, phase_shift, direction, rest_lengths, ramp_up_time=0.0, with_spline=False)[source]
This class applies muscle torques along the body. The applied muscle torques are treated as applied external forces. This class can apply muscle torques as a traveling wave with a beta spline or only as a traveling wave. For implementation details refer to Gazzola et. al. RSoS. (2018).
- Attributes
- direction: numpy.ndarray
2D (dim, 1) array containing data with ‘float’ type. Muscle torque direction.
- angular_frequency: float
Angular frequency of traveling wave.
- wave_number: float
Wave number of traveling wave.
- phase_shift: float
Phase shift of traveling wave.
- ramp_up_time: float
Applied muscle torques are ramped up until ramp up time.
- my_spline: numpy.ndarray
1D (blocksize) array containing data with ‘float’ type. Generated spline.
- __init__(base_length, b_coeff, period, wave_number, phase_shift, direction, rest_lengths, ramp_up_time=0.0, with_spline=False)[source]
- Parameters
- base_length: float
Rest length of the rod-like object.
- b_coeff: nump.ndarray
1D array containing data with ‘float’ type. Beta coefficients for beta-spline.
- period: float
Period of traveling wave.
- wave_number: float
Wave number of traveling wave.
- phase_shift: float
Phase shift of traveling wave.
- direction: numpy.ndarray
1D (dim) array containing data with ‘float’ type. Muscle torque direction.
- ramp_up_time: float
Applied muscle torques are ramped up until ramp up time.
- with_spline: boolean
Option to use beta-spline.
Built-in Environment Interactions
Numba implementation module containing interactions between a rod and its environment.
- class elastica.interaction.AnisotropicFrictionalPlane(k, nu, plane_origin, plane_normal, slip_velocity_tol, static_mu_array, kinetic_mu_array)[source]
This anisotropic friction plane class is for computing anisotropic friction forces on rods. A detailed explanation of the implemented equations can be found in Gazzola et al. RSoS. (2018).
- Attributes
- k: float
Stiffness coefficient between the plane and the rod-like object.
- nu: float
Dissipation coefficient between the plane and the rod-like object.
- plane_origin: numpy.ndarray
2D (dim, 1) array containing data with ‘float’ type. Origin of the plane.
- plane_normal: numpy.ndarray
2D (dim, 1) array containing data with ‘float’ type. The normal vector of the plane.
- slip_velocity_tol: float
Velocity tolerance to determine if the element is slipping or not.
- static_mu_array: numpy.ndarray
1D (3,) array containing data with ‘float’ type. [forward, backward, sideways] static friction coefficients.
- kinetic_mu_array: numpy.ndarray
1D (3,) array containing data with ‘float’ type. [forward, backward, sideways] kinetic friction coefficients.
- __init__(k, nu, plane_origin, plane_normal, slip_velocity_tol, static_mu_array, kinetic_mu_array)[source]
- Parameters
- k: float
Stiffness coefficient between the plane and the rod-like object.
- nu: float
Dissipation coefficient between the plane and the rod-like object.
- plane_origin: numpy.ndarray
2D (dim, 1) array containing data with ‘float’ type. Origin of the plane.
- plane_normal: numpy.ndarray
2D (dim, 1) array containing data with ‘float’ type. The normal vector of the plane.
- slip_velocity_tol: float
Velocity tolerance to determine if the element is slipping or not.
- static_mu_array: numpy.ndarray
1D (3,) array containing data with ‘float’ type. [forward, backward, sideways] static friction coefficients.
- kinetic_mu_array: numpy.ndarray
1D (3,) array containing data with ‘float’ type. [forward, backward, sideways] kinetic friction coefficients.
- class elastica.interaction.InteractionPlane(k, nu, plane_origin, plane_normal)[source]
The interaction plane class computes the plane reaction force on a rod-like object. For more details regarding the contact module refer to Eqn 4.8 of Gazzola et al. RSoS (2018).
- Attributes
- k: float
Stiffness coefficient between the plane and the rod-like object.
- nu: float
Dissipation coefficient between the plane and the rod-like object.
- plane_origin: numpy.ndarray
2D (dim, 1) array containing data with ‘float’ type. Origin of the plane.
- plane_normal: numpy.ndarray
2D (dim, 1) array containing data with ‘float’ type. The normal vector of the plane.
- surface_tol: float
Penetration tolerance between the plane and the rod-like object.
- __init__(k, nu, plane_origin, plane_normal)[source]
- Parameters
- k: float
Stiffness coefficient between the plane and the rod-like object.
- nu: float
Dissipation coefficient between the plane and the rod-like object.
- plane_origin: numpy.ndarray
2D (dim, 1) array containing data with ‘float’ type. Origin of the plane.
- plane_normal: numpy.ndarray
2D (dim, 1) array containing data with ‘float’ type. The normal vector of the plane.
- class elastica.interaction.SlenderBodyTheory(dynamic_viscosity)[source]
This slender body theory class is for flow-structure interaction problems. This class applies hydrodynamic forces on the body using the slender body theory given in Eq. 4.13 of Gazzola et al. RSoS (2018).
- Attributes
- dynamic_viscosity: float
Dynamic viscosity of the fluid.
Connections / Contact / Joints
Module containing joint classes to connect multiple rods together.
Description
Available Connection/Contact/Joints
This free joint class is the base class for all joints. |
|
Assumes that the second entity is a rigid body for now, can be changed at a later time |
|
The fixed joint class restricts the relative movement and rotation between two nodes and elements by applying restoring forces and torques. |
|
This hinge joint class constrains the relative movement and rotation (only one axis defined by the user) between two nodes and elements (chosen by the user) by applying restoring forces and torques. |
|
This class is modeling self contact of rod. |
Compatibility
Connection / Contact / Joints |
Rod |
Rigid Body |
|---|---|---|
FreeJoint |
✅ |
✅ |
ExternalContact |
✅ |
❌ |
FixedJoint |
✅ |
✅ |
HingeJoint |
✅ |
❌ |
SelfContact |
✅ |
❌ |
Built-in Connection / Contact / Joint
- class elastica.joint.FreeJoint(k, nu)[source]
This free joint class is the base class for all joints. Free or spherical joints constrains the relative movement between two nodes (chosen by the user) by applying restoring forces. For implementation details, refer to Zhang et al. Nature Communications (2019).
Notes
Every new joint class must be derived from the FreeJoint class.
- Attributes
- k: float
Stiffness coefficient of the joint.
- nu: float
Damping coefficient of the joint.
- class elastica.joint.ExternalContact(k, nu)[source]
Assumes that the second entity is a rigid body for now, can be changed at a later time
Most of the cylinder-cylinder contact SHOULD be implemented as given in this paper.
but, it isn’t (the elastica-cpp kernels are implented)! This is maybe to speed-up the kernel, but it’s potentially dangerous as it does not deal with “end” conditions correctly.
- class elastica.joint.FixedJoint(k, nu, kt)[source]
The fixed joint class restricts the relative movement and rotation between two nodes and elements by applying restoring forces and torques. For implementation details, refer to Zhang et al. Nature Communications (2019).
- Attributes
- k: float
Stiffness coefficient of the joint.
- nu: float
Damping coefficient of the joint.
- kt: float
Rotational stiffness coefficient of the joint.
- class elastica.joint.HingeJoint(k, nu, kt, normal_direction)[source]
This hinge joint class constrains the relative movement and rotation (only one axis defined by the user) between two nodes and elements (chosen by the user) by applying restoring forces and torques. For implementation details, refer to Zhang et. al. Nature Communications (2019).
- Attributes
- k: float
Stiffness coefficient of the joint.
- nu: float
Damping coefficient of the joint.
- kt: float
Rotational stiffness coefficient of the joint.
- normal_direction: numpy.ndarray
2D (dim, 1) array containing data with ‘float’ type. Constraint rotation direction.
- __init__(k, nu, kt, normal_direction)[source]
- Parameters
- k: float
Stiffness coefficient of the joint.
- nu: float
Damping coefficient of the joint.
- kt: float
Rotational stiffness coefficient of the joint.
- normal_direction: numpy.ndarray
2D (dim, 1) array containing data with ‘float’ type. Constraint rotation direction.
Callback Functions
Module contains callback classes to save simulation data for rod-like objects
Description
The frequency at which you have your callback function save data will depend on what information you need from the simulation. Excessive call backs can cause performance penalties, however, it is rarely necessary to make call backs at a frequency that this becomes a problem. We have found that making a call back roughly every 100 iterations has a negligible performance penalty.
Currently, all data saved from call back functions is saved in memory. If you have many rods or are running for a long time, you may want to consider editing the call back function to write the saved data to disk so you do not run out of memory during the simulation.
This is the base class for callbacks for rod-like objects. |
|
ExportCallback is an example callback class to demonstrate how to export rod-data into data file. |
|
MyCallBack class is derived from the base callback class. |
Built-in Constraints
- class elastica.callback_functions.CallBackBaseClass[source]
This is the base class for callbacks for rod-like objects.
Notes
Every new callback class must be derived from CallBackBaseClass.
- class elastica.callback_functions.ExportCallBack(step_skip, path, method, initial_file_count=0, save_every=100000000.0)[source]
ExportCallback is an example callback class to demonstrate how to export rod-data into data file.
If one wants to customize the saving data, we recommend to override make_callback method.
- Attributes
- AVAILABLE_METHOD
Supported method to save the file. We recommend binary save to maintain the tensor structure of data.
- FILE_SIZE_CUTOFF
Maximum buffer size for each file. If the buffer size exceed, new file is created. Actual size of the file is expected to be marginally larger.
- __init__(step_skip, path, method, initial_file_count=0, save_every=100000000.0)[source]
- Parameters
- step_skipint
Collect data at each step_skip steps.
- pathstr
Path to save the file. If directories are prepended, they must exist. The filename depends on the method. The path is not expected to include extension.
- methodstr
Method name. Only the name in AVAILABLE_METHOD is allowed.
- initial_file_countint
Initial file count index that will be appended
- save_everyint
Save the file every save_every steps. (default=1e8)
- class elastica.callback_functions.MyCallBack(step_skip, callback_params)[source]
MyCallBack class is derived from the base callback class. This is just an example of a callback class, this class as an example/template to write new call back classes in your client file.
- Attributes
- sample_every: int
Collect data using make_callback method every sampling step.
- callback_params: dict
Collected callback data is saved in this dictionary.
Time steppers
Symplectic time steppers and concepts for integrating the kinematic and dynamic equations of rod-like objects.
- class elastica.timestepper.symplectic_steppers.PEFRL[source]
Position Extended Forest-Ruth Like Algorithm of I.M. Omelyan, I.M. Mryglod and R. Folk, Computer Physics Communications 146, 188 (2002), http://arxiv.org/abs/cond-mat/0110585
Simulator
Base System
Basic coordinating for multiple, smaller systems that have an independently integrable interface (i.e. works with symplectic or explicit routines timestepper.py.)
- class elastica.wrappers.base_system.BaseSystemCollection[source]
Base System for simulator classes. Every simulation class written by the user must be derived from the BaseSystemCollection class; otherwise the simulation will proceed.
- Attributes
- allowed_sys_types: tuple
Tuple of allowed type rod-like objects. Here use a base class for objects, i.e. RodBase.
- _systems: list
List of rod-like objects.
- finalize()[source]
This method finalizes the simulator class. When it is called, it is assumed that the user has appended all rod-like objects to the simulator as well as all boundary conditions, callbacks, etc., acting on these rod-like objects. After the finalize method called, the user cannot add new features to the simulator class.
CallBacks
Provides the callBack interface to collect data over time (see callback_functions.py).
- class elastica.wrappers.callbacks.CallBacks[source]
CallBacks class is a wrapper for calling callback functions, set by the user. If the user wants to collect data from the simulation, the simulator class has to be derived from the CallBacks class.
- Attributes
- _callback_list: list
List of call back classes defined for rod-like objects.
Connect
Provides the connections interface to connect entities (rods, rigid bodies) using joints (see joints.py).
- class elastica.wrappers.connections.Connections[source]
The Connections class is a wrapper for connecting rod-like objects using joints selected by the user. To connect two rod-like objects, the simulator class must be derived from the Connections class.
- Attributes
- _connections: list
List of joint classes defined for rod-like objects.
- connect(first_rod, second_rod, first_connect_idx=None, second_connect_idx=None)[source]
This method connects two rod-like objects using the selected joint class. You need to input the two rod-like objects that are to be connected as well as set the element indexes of these rods where the connection occurs.
- Parameters
- first_rodobject
Rod-like object
- second_rodobject
Rod-like object
- first_connect_idxint
Index of first rod for joint.
- second_connect_idxint
Index of second rod for joint.
- Returns
Constraints
Provides the constraints interface to enforce displacement boundary conditions (see boundary_conditions.py).
- class elastica.wrappers.constraints.Constraints[source]
The Constraints class is a wrapper for enforcing displacement boundary conditions. To enforce boundary conditions on rod-like objects, the simulator class must be derived from Constraints class.
- Attributes
- _constraints: list
List of boundary condition classes defined for rod-like objects.
Forcing
Provides the forcing interface to apply forces and torques to rod-like objects (external point force, muscle torques, etc).
- class elastica.wrappers.forcing.Forcing[source]
The Forcing class is a wrapper for applying boundary conditions that consist of applied external forces. To apply forcing on rod-like objects, the simulator class must be derived from the Forcing class.
- Attributes
- _ext_forces_torques: list
List of forcing class defined for rod-like objects.
Utility Functions
Here, we provide some useful functions that we often use along with elastica.
Transformations
Rotation interface functions
- elastica.transformations.inv_skew_symmetrize(matrix_collection)[source]
Safe wrapper around inv_skew_symmetrize that does checking and formatting on type of matrix_collection using format_matrix_shape function.
- Parameters
- matrix_collection: numpy.ndarray
- Returns
- elastica.transformations.rotate(matrix, scale, axis)[source]
This function takes single or multiple frames as matrix. Then rotates these frames around a single axis for all frames, or can rotate each frame around its own rotation axis as defined by user. Scale determines how much frames rotates around this axis.
matrix: minimum shape = dim**2x1, supports shape = 3x3xn axis: minimum dim = 3x1, 1x3, supports dim = 3xn, nx3 scale: minimum float, supports 1D vectors also dim = n
Math
Quadrature and difference kernels
- elastica._calculus.difference_kernel(array_collection)
This function does differentiation.
- Parameters
- array_collectionnumpy.ndarray
2D (dim, blocksize) array containing data with ‘float’ type.
- Returns
- result: numpy.ndarray
2D (dim, blocksize-1) array containing data with ‘float’ type.
Notes
Micro benchmark results showed that for a block size of 100, using timeit Python version: 9.07 µs ± 2.15 µs per loop This version: 952 ns ± 91.1 ns per loop
- elastica._calculus.difference_kernel_for_block_structure(array_collection, ghost_idx)
This function does the differentiation, for Cosserat rod model equations. This form specifically for the block structure implementation and there is a reset function call, to reset ghosts.
- Parameters
- array_collectionnumpy.ndarray
2D (dim, blocksize) array containing data with ‘float’ type.
- ghost_idxnumpy.ndarray
1D (n_ghost) array containing data with ‘int’ type.
- Returns
- result: numpy.ndarray
2D (dim, blocksize-1) array containing data with ‘float’ type.
Notes
Micro benchmark results showed that for a block size of 100, using timeit Python version: 7.1 µs per loop This version: 1.01 µs per loop
User should use this function with extreme care, since this function is rewritten for block structure.
- elastica._calculus.position_average(vector)
This function computes the average between elements of a vector.
- Parameters
- vectornumpy.ndarray
1D (blocksize) array containing data with ‘float’ type.
- Returns
- result: numpy.ndarray
1D (blocksize-1) array containing data with ‘float’ type.
Notes
Micro benchmark results showed that for a block size of 100, using timeit Python version: 2.37 µs ± 764 ns per loop This version: 713 ns ± 3.69 ns per loop
- elastica._calculus.position_difference_kernel(vector)
This function computes difference between elements of a batch vector.
- Parameters
- vector: numpy.ndarray
2D (dim, blocksize) array containing data with ‘float’ type.
- Returns
- result: numpy.ndarray
2D (dim, blocksize-1) array containing data with ‘float’ type.
Notes
Micro benchmark results showed that for a block size of 100, using timeit Python version: 3.29 µs ± 767 ns per loop This version: 840 ns ± 14.5 ns per loop
- elastica._calculus.quadrature_kernel(array_collection)
Simple trapezoidal quadrature rule with zero at end-points, in a dimension agnostic way
- Parameters
- array_collectionnumpy.ndarray
2D (dim, blocksize) array containing data with ‘float’ type.
- Returns
- result: numpy.ndarray
2D (dim, blocksize+1) array containing data with ‘float’ type.
Notes
Micro benchmark results, for a block size of 100, using timeit Python version: 8.14 µs ± 1.42 µs per loop This version: 781 ns ± 18.3 ns per loop
- elastica._calculus.quadrature_kernel_for_block_structure(array_collection, ghost_idx)
Simple trapezoidal quadrature rule with zero at end-points, in a dimension agnostic way. This form specifically for the block structure implementation and there is a reset function call, to reset ghosts.
- Parameters
- array_collectionnumpy.ndarray
2D (dim, blocksize) array containing data with ‘float’ type.
- ghost_idxnumpy.ndarray
1D (n_ghost) array containing data with ‘int’ type.
- Returns
- result: numpy.ndarray
2D (dim, blocksize+1) array containing data with ‘float’ type.
Notes
Micro benchmark results, for a block size of 100, using timeit Python version: 8.21 µs per loop This version: 1.03 µs per loop
User should use this function with extreme care, since this function is rewritten for block structure.
Convenient linear algebra kernels
Rotation kernels
Miscellaneous
Handy utilities
- elastica.utils.isqrt(num)[source]
Efficiently computes sqrt for integer values
Dropin replacement for python3.8’s isqrt function Credits : https://stackoverflow.com/a/53983683
- Parameters
- numint, input
- Returns
- sqrt_numint, rounded down sqrt of num
Notes
Doesn’t handle edge-cases of negative numbers by design
Doesn’t type-check for integers by design, although it is hinted at
Examples
- Return type
int
Localized Force and Torque
Originated by the investigation in the issue #39
Discussion
In elastica, a force is applied on a node while a torque is applied on an element.
For example, a localized force EndpointForce is applied only on a node. However, we found that adding additional torque on a neighboring elements, such that the torque represent a local moment induced by the point-force, could yield better convergence.
We haven’t found any evidence (yet) that this actually changes the steady-state configuration and kinematics, since it is two different implementation of the same point-load.
We suspect the improvement by adding additional torque is due to explicitly giving the force-boundary condition that match the final internal-stress state.
Comparison
Factoring the additional-torque on a neighboring element leads to slightly better error estimates for the Timoshenko beam example. The results are condensed here. With new implementation, we achieved the same error with less number of discretization, but it also requires additional torque computation.
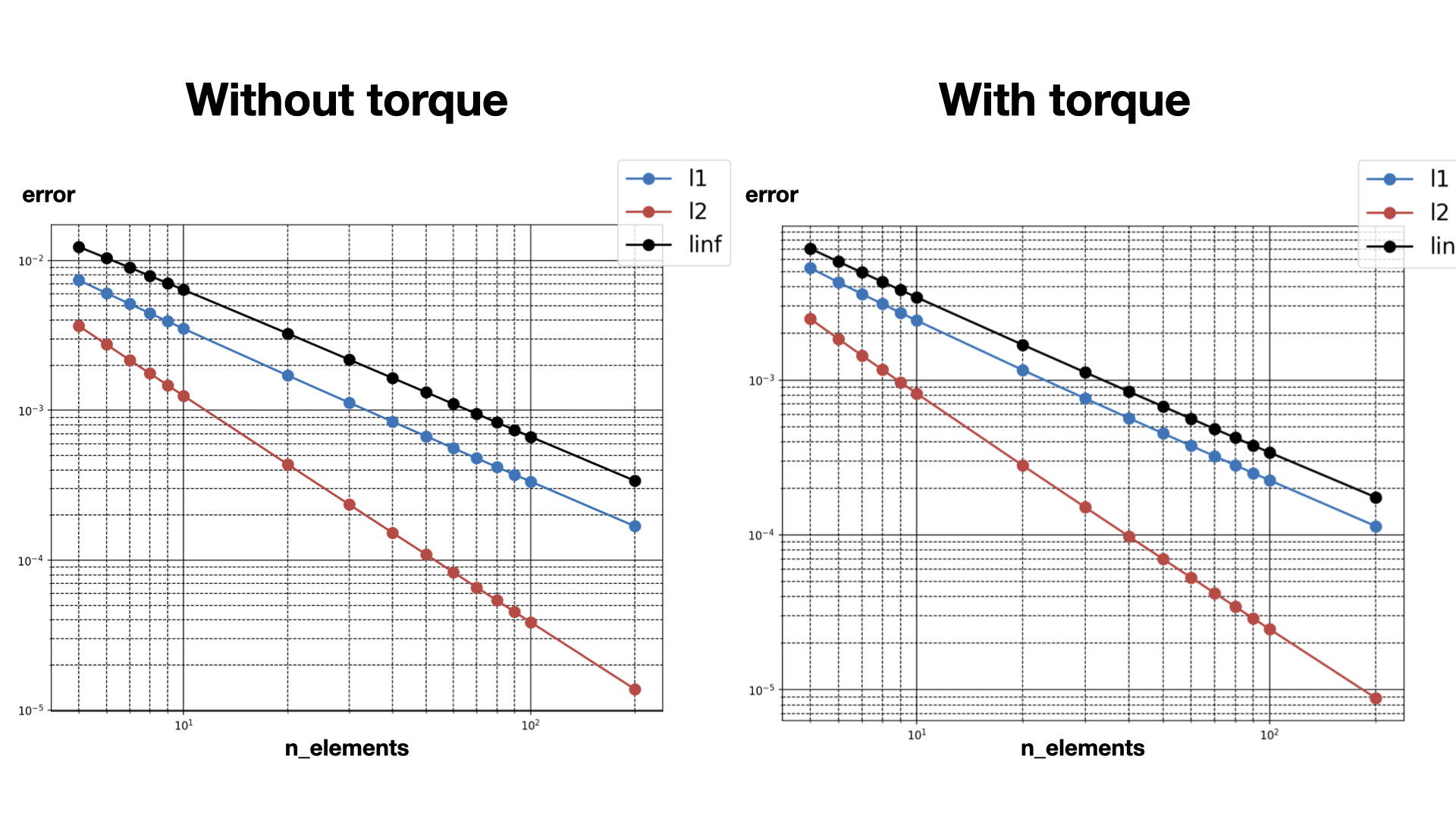
Modified Implementation
class EndpointForcesWithTorques(NoForces):
"""
This class applies constant forces on the endpoint nodes.
"""
def __init__(self, end_force, ramp_up_time=0.0):
"""
Parameters
----------
start_force: numpy.ndarray
2D (dim, 1) array containing data with 'float' type.
Force applied to first node of the rod-like object.
end_force: numpy.ndarray
2D (dim, 1) array containing data with 'float' type.
Force applied to last node of the rod-like object.
ramp_up_time: float
Applied forces are ramped up until ramp up time.
"""
self.end_force = end_force
assert ramp_up_time >= 0.0
self.ramp_up_time = ramp_up_time
def apply_forces(self, system, time=0.0):
factor = min(1.0, time / self.ramp_up_time)
self.external_forces[..., -1] += self.end_force * factor
def apply_torques(self, system, time: np.float64 = 0.0):
factor = min(1.0, time / self.ramp_up_time)
arm_length = system.lengths[...,-1]
director = system.director_collection[..., -1]
self.external_torques[..., -1] += np.cross(
[0.0, 0.0, 0.5 * arm_length], director @ self.end_force
)
Code Design: Mixin and Composition
Elastica package follows Mixin and composition design patterns that may be unfamiliar to users. Here is a collection of references that introduce the package design.
References
Hackathon Readme
NCSA-NVIDIA AI Hackathon held at the University of Illinois from March 7-8 2020.
Problem Statement
The objective is to train a model to move a (cyber)-octopus with two soft arms and a head to reach a target location, and then grab an object. The octopus is modeled as an assembly of Cosserat rods and is activated by muscles surrounding its arms. Input to the mechanical model is the activation signals to the surrounding muscles, which causes it to contract, thus moving the arms. The output of the model comes from the octopus’ environment. The mechanical model will be provided both for the octopus and its interaction with its environment. The goal is to find the correct muscle activation signals that make the octopus crawl to reach the target location and then make one arm to grab the object.
Progression of specific goals
These goals build on each other, you need to successfully accomplish all prior goals to get credit for later goals.
Make octopus crawl towards some direction. (5 points)
Make your octopus crawl to the target location. (7.5 points)
Make octopus to move the object using its arms. (7.5 points)
Have your octopus grab the object by wrapping one arm around the object. (10 points)
Make your octopus return to its starting location with the object. (20 points)
Generalize your policy to perform these tasks for an arbitrarily located object. (50 points)
Problem Context
Octopuses have flexible limbs made up of muscles with no internal bone structure. These limbs, know as muscular hydrostats, have an almost infinite number of degrees of freedom, allowing an octopus to perform complex actions with its arms, but also making them difficult to mathematically model. Attempts to model octopus arms are motivated not only by a desire to understand them biologically, but also to adapt their control ability and decision making processes to the rapidly developing field of soft robotics. We have developed a simulation package Elastica that models flexible 1-d rods, which can be used to represent octopus arms as a long, slender rod. We now want to learn methods for controlling these arms.
You are being provided with a model of an octopus that consists of two arms connected by a head. Each arm can be controlled independently. These arms are actuated through the contraction of muscles in the arms. This muscle activation produces a torque profile along the arm, resulting in movement of the arm. The arms interact with the ground through friction. Your goal is to teach the octopus to crawl towards an object, grab it, and bring it back to where the octopus started.
Controlling octopus arms with hierarchical basis functions
For this problem, we abstract the activation of the octopus muscles to the generation of a torque profile defined by the activation of a set of hierarchical radial basis function. Here we are using Gaussian basis functions.


There are three levels of these basis functions, with 1 basis function in the first level, 2 in the second level and 4 in the third, leading to 7 basis functions in set. These levels have different maximum levels of activation. The lower levels have larger magnitudes than the higher levels, meaning they represent bulk motion of the rod while the higher levels allow finer control of the rod along the interval. In the code, the magnitude of each level will be fixed but you can choose the amount of activation at each level by setting the activation level between -1 and 1.
There are two bending modes (in the normal and binormal directions) and a twisting mode (in the tangent direction), so we define torques in these three different directions and independently for each arm. This yields six different sets of basis functions that can be activated for a total of 42 inputs.
Overview of provided Elastica code
We are providing you the Elastica software package which is written in Python. Elastica simulates the dynamics and kinematics of 1-d slender rods. We have set up the model for you such that you do not need to worry about the details of the model, only the activation patterns of the muscle.
In the provided examples/ArmWithBasisFunctions/two_arm_octopus_ai_imp.py file you will import the Environment class which will define and setup the simulation.
Environment has three relevant functions:
Environment.reset(self): setups and initializes the simulation environment. Call this prior to running any simulations.Environment.step(self, activation_array_list, time): takes one timestep for muscle activations defined inactivation_array_list.Environment.post_processing(self, filename_video): Makes 3D video based on saved data from simulation. Requiresffmpeg.
We do not suggest changingEnvironmentas it may cause unintended consequences to the simulation.
You will want to work within main() to interface with the simulations and develop your learning model. In main(), the first thing you need to define is the length of your simulation and initialize the environment. final_time is the length of time that your simulation will run unless exited early. You want to give your octopus enough time to complete the task, but too much time will lead to excessively long simulation times.
# Set simulation final time
final_time = 10.0
# Initialize the environment
target_position = np.array([-0.4, 0.0, 0.5])
env = Environment(final_time, target_position, COLLECT_DATA_FOR_POSTPROCESSING=True)
total_steps, systems = env.reset()
With your system initialized, you are now ready to perform the simulation. To perform the simulation there are two steps:
Evaluate the reward function and define the basis function activations
Perform time step
There is also a user defined stopping condition. When met, this will immediately end the simulation. This can be useful to end the simulation if the octopus successfully complete the task early, or has a sufficiently low reward function that there is no point continuing the simulation.
for i_sim in tqdm(range(total_steps)):
""" Learning loop """
if i_sim % 200:
""" Add your learning algorithm here to define activation """
# This will be based on your observations of the system and
# evaluation of your reward function.
shearable_rod = systems[0]
rigid_body = systems[1]
reward = reward_function()
activation = segment_activation_function()
""" Perform time step """
time, systems, done = env.step(activation, time)
""" User defined condition to exit simulation loop """
done = user_defined_condition_function(reward, systems, time)
if done:
break
The state of the octopus is available in shearable_rod. The octopus consists of a series of 121 nodes. Nodes 0-49 relate to one arm, nodes 50-70 relate to the head, and nodes 71-120 relate to the second arm. shearable_rod.position_collection returns an array with entries relating to the position of each node.
The state of the target object is available in rigid_body.
It is important to properly define the activation function. It consists of a list of lists defining the activation of the two arms in each of the the three modes of deformation. The activation function should be a list with three entries for the three modes of deformation. Each of these entries is in turn a list with two entries, which are arrays of the basis function activations for the two arms.
activation = [
[arm_1_normal, arm_2_normal], # activation in normal direction
[arm_1_binormal, arm_2_binormal], # activation in binormal direction
[arm_1_tangent, arm_2_tangent], # activation in tangent direction
]
Each activation array has 7 entries that relate to the activation of different basis functions. The ordering goes from the top level to the bottom level of the hierarchy. Each entry can vary from -1 to 1.
activation_array[0] – One top level muscle segment
activation_array[1:3] – Two mid level muscle segment
activation_array[3:7] – Four bottom level muscle segment
A few practical notes
To save a video of the octopus with
Environment.post_processing(), you need to installffmeg. You can download and install it here.The timestep size is set to 40 μs. This is necessary to keep the simulation stable, however, you may not need to update your muscle activations that often. Varying the learning time step will change how often your octopus updates its behaviour.
There is a 15-20 second startup delay while the simulation is initialized. This is a one time cost whenever the Python script is run and resetting the simulation using
.rest()does not incur this delay for subsequent simulations.We suggest installing
requirements.txtandoptional-requirements.txt, to run Elastica without any problem.