Localized Force and Torque
Contents
Localized Force and Torque#
Originated by the investigation in the issue #39
Discussion#
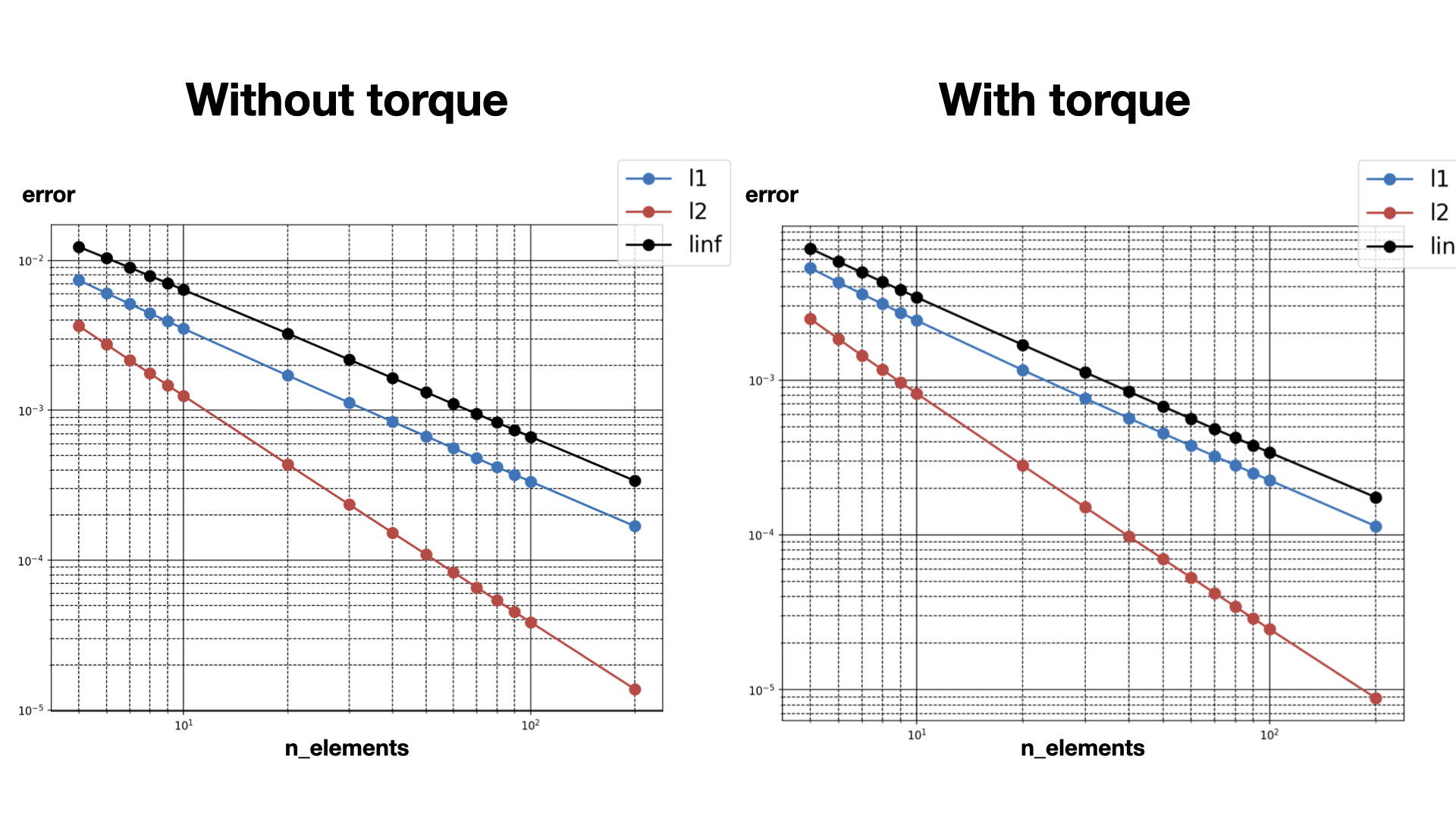
In elastica, a force is applied on a node while a torque is applied on an element.
For example, a localized force EndpointForce is applied only on a node. However, we found that adding additional torque on a neighboring elements, such that the torque represent a local moment induced by the point-force, could yield better convergence.
We haven’t found any evidence (yet) that this actually changes the steady-state configuration and kinematics, since it is two different implementation of the same point-load.
We suspect the improvement by adding additional torque is due to explicitly giving the force-boundary condition that match the final internal-stress state.
Comparison#
Factoring the additional-torque on a neighboring element leads to slightly better error estimates for the Timoshenko beam example. The results are condensed here. With new implementation, we achieved the same error with less number of discretization, but it also requires additional torque computation.
Modified Implementation#
class EndpointForcesWithTorques(NoForces):
"""
This class applies constant forces on the endpoint nodes.
"""
def __init__(self, end_force, ramp_up_time=0.0):
"""
Parameters
----------
start_force: numpy.ndarray
2D (dim, 1) array containing data with 'float' type.
Force applied to first node of the rod-like object.
end_force: numpy.ndarray
2D (dim, 1) array containing data with 'float' type.
Force applied to last node of the rod-like object.
ramp_up_time: float
Applied forces are ramped up until ramp up time.
"""
self.end_force = end_force
assert ramp_up_time >= 0.0
self.ramp_up_time = ramp_up_time
def apply_forces(self, system, time=0.0):
factor = min(1.0, time / self.ramp_up_time)
self.external_forces[..., -1] += self.end_force * factor
def apply_torques(self, system, time: np.float64 = 0.0):
factor = min(1.0, time / self.ramp_up_time)
arm_length = system.lengths[...,-1]
director = system.director_collection[..., -1]
self.external_torques[..., -1] += np.cross(
[0.0, 0.0, 0.5 * arm_length], director @ self.end_force
)